§ 12 General Surfaces
First, the equation of the surface and the coordinates of the curve
|
Figure 7.23 |
The surface equation has the form
Implicit F ( x , y , z ) =0
Explicit z = f ( x , y ) _
Parametric 
Vector r = r ( u , ) ![]()
或r=x(u,)i+y(u,)j+z(u,)k ![]()
![]()
![]()
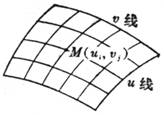
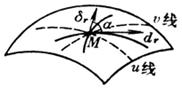
For surfaces represented by parametric or vector expressions, if a series of numerical values L is taken and u is continuously changed, then r ( u , )( i =1,2, L ) represents a family of curves, called u -lines (Figure 7.23 ). ); similarly, if u is a series of values u 1 , u 2 , L , and let it vary continuously, then r ( u i , )( i =1,2, L ) represents another family of continuous curves, called lines . The u line and the line form a curve network on the surface, which is called coordinate line or coordinate network . So u = u i ,![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() = This number pair can determine a point
= This number pair can determine a point ![]() M on the surface , and this number pair ( ui , ) is called the curve coordinate (or Gaussian coordinate) of the point M.
M on the surface , and this number pair ( ui , ) is called the curve coordinate (or Gaussian coordinate) of the point M.![]()
Second,
the direction of the tangent, normal and surface
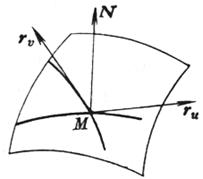
[ Normal unit vector ] All surface curves through M on the surface (that is, the curves on the surface), the tangent at point M falls on the same plane (except for singularities), and this plane is called the tangent of the surface at point M The straight line perpendicular to the tangent plane through the point M is called the normal of the surface at the point M.
sliced through vector
r u =sum![]()
![]()
are called coordinate vectors, and they are the tangent vectors of the line u and the line at point M respectively (Figure 7.24 )![]()
|
Figure 7.24 |
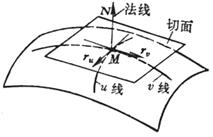
The normal unit vector of a point on the surface is

Here, in order to distinguish the normal unit vector of the curve and the normal unit vector of the surface, the former is represented by n , and the latter is represented by N.
[ Orientation of the surface ] The orientation of the surface is defined as follows: the side facing the positive side of N is the front side of the surface (the side seen in Figure 7.24 ); the other side is the reverse side .
[ Surface Tangent Equation and Normal Equation ]
|
Surface equation |
Section equation |
normal equation |
|
z=f(x,y)
r=r(u,) |
or ( r - r 0 ) N 0 =0 |
or where is the parameter |

The table represents the value at point M ( x 0 , y 0 , z 0 ) respectively, r 0 is the vector radius of point M , respectively represents the value at point M , and N 0 is the normal unit vector of point M.![]()
![]()
![]()
![]()
[ Singularity of a surface ] If the three partial derivatives of a point M ( x 0 , y 0 , z 0 ) on the surface F ( x , y , z )=0 are equal to zero at the same time, that is
![]()
Then the point M is called the singularity of the surface .
3.
The first basic quadratic form and the measurement of the surface
[ The first basic quadratic type and the first basic quantity ]
|
Surface equation |
The first fundamental quadratic form and the first fundamental quantity |
|
z=f(x,y)
or r=r(u,) |
ds2=Edx22fdxdy+Gdy2 in the formula E=1+ F= G=1+ d s is the differential of the arc at the point M ( x , y , z ) , d s 2 is called the first fundamental quadratic form, E , F , G are called the first fundamental quantity ds2==Edu2+2Fdud+Gd2 in the formula E= F= G= The first fundamental quantities E , F , and G all take values at point M. The first fundamental quadratic form of every point (except singularity) on the surface is positive definite, i.e. E>0,G>0,EG-F2>0 |
[ Calculation formulas for arc length, area, included angle, etc. on the surface ]
|
Quantities and Graphics |
Calculation formula |
|
The arc length of the surface curve L The surface area S (surrounded by the curve) The angle between the curves (two curves intersect at the point M )
|
|
|
In the formula, E , F , and G are the first basic quantities of the surface ( valued at point M ). The intersection angle of the coordinate lines u = constant and v = constant is determined by the necessary and sufficient conditions for the orthogonality of the coordinate lines to be:
|
|
[ Deformation of the surface ] The transformation that keeps the length of the surface curve unchanged is called the deformation of the surface. Two surfaces S with the same first fundamental quadratic form are called fitted or equidistant. This transformation from S to and from S is called an isometric transformation. The geometric quantities about the surface that are invariant after the isometric transformation are called isometric invariants.![]()
![]()
![]()
A specific expression of isometric transformation is to continuously bend a surface while keeping the length of the surface curve unchanged, so that the surface finally fits with another surface; therefore, isometric transformation is also called deformation.
From the definition, it can be deduced that the necessary and sufficient condition for two surfaces to deform each other is that they have the same first fundamental quadratic form after proper selection of parameters.
Fourth, the curvature of the second basic quadratic surface curve
[ Second Fundamental Quadratic Type and Second Fundamental Quantity ]
|
Surface equation |
Second Fundamental Quadratic Form and Second Fundamental Quantity |
|
|
in the formula
|
|
Surface equation |
Second Fundamental Quadratic Form and Second Fundamental Quantity |
|
or
|
In the formula, the partial derivative takes values at the point , E , F , and G are the first basic quantities, and N is the normal unit vector of the surface at the point M.
|

|
Figure 7.25 |
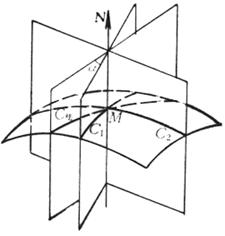
[ Main normal section (main direction, main curvature radius and umbilical point) ] The intersection of the plane passing through the normal of a point M on the surface and the surface ( ) is called the normal section of the point M. Therefore, there are infinitely many normal sections passing through a point on the surface, and a tangent direction of a given point M has a certain normal section. In the normal section of the point M , the two with the largest and the smallest curvature are respectively recorded , they are called the main normal section, and the tangent direction corresponding to the point M is called the main direction, and these two directions are perpendicular to each other. The radii of curvature ( ) of are called the principal radii of curvature, and they are equal to the two roots of the following equations:![]()
![]()
![]()
![]()
![]()
For surfaces , the equation is![]()
![]()
where p , q , r , s , t , h see the table on the previous page.
For surfaces , the equation is![]()
![]()
In the formula, E , F , G are the first fundamental quantities of the surface, L , M , N are the second fundamental quantities of the surface.
The point where the principal radius of curvature is equal is called the umbilical point of the surface, on the umbilical point
![]()
[ Curvature line and Roderick's formula ] The main direction is a quadratic equation![]()
![]()
of the two roots. Surface curves that satisfy this differential equation are called curvature lines. The tangent direction of each point on the curvature line is the main direction. The curvature line constitutes an orthogonal curve network on the surface. The curvature line has the following characteristics:
A necessary and sufficient condition for a curved surface C to be a curvature line is that a developable surface is formed along the surface normal of C, that is, when the point M on C changes, the normal of the surface at point M has an envelope .![]()
This feature can also be expressed as this formula called Roderick's formula.
![]()
5.
The radius of curvature of the surface curve
[ The radius of curvature of the normal section and Euler's formula ] When the right side is positive, the normal unit vector n of the normal section is consistent with the normal unit vector N of the surface , then the curvature radius of the normal section is ; the right side is negative When , it means that n is opposite to N , then the radius of curvature of the normal section is .
![]()
![]()
![]()
If the angle between the section plane passing through the normal section and the section plane passing through the main normal section is , then![]()
![]()
![]()
![]()
In the formula, the principal curvature radius is called the normal curvature, and this equation is called Euler's formula.![]()
![]()
|
Figure 7.26 |
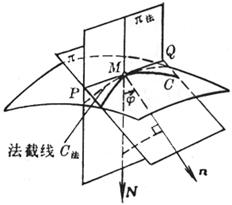
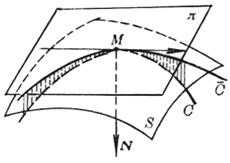
[ Radius of curvature of an arbitrary truncated line ] Using an arbitrary plane truncated surface passing through the point M , a sectional line C (figure ) is obtained, its tangent at the point M is PQ , and the normal unit vector of the curve C is n , through the straight line PQ and the curved surface The normal unit vector N of N is the plane , and the normal section is obtained by cutting the surface . If the angle between the vector N and n is , and the radius of curvature is , then the radius of curvature of the section C is![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (1)
(1)
[ Radius of Curvature of Arbitrary Curve on Surface and Meniere's Theorem ]
Suppose the intersection line of the approximation surface of a point M on any curve B on the surface with the surface is C , then the radius of curvature of the surface B is equal to the radius of curvature of the sectional line C , so from the formula ( 1 ), we get Meniere's theorem: any curve B on the surface The radius of curvature of is equal to the orthographic projection of the radius of curvature of the corresponding normal section intercepted on the surface normal on the principal normal of curve B.![]()
![]()
6.
The third basic quadratic form and the curvature of the surface
[ The third fundamental quadratic form and the third fundamental quantity ]
![]()
is called the third fundamental quadratic form, where N is the normal unit vector of the surface,
![]()
called the third fundamental quantity.
[ Mean and Total Curvature (or Gaussian Curvature) of Surface ]
|
Surface equation |
Curvature Definition |
official |
|
|
The average number of principal curvatures is called curvature, denoted as H , and the product of principal curvatures is called total curvature (or Gaussian curvature), denoted as K , |
|
|
|
|
Note: 1 , , H and K are all functions of points on the surface, and have nothing to do with the curve coordinate u taken .![]()
![]()
2. The point is called an ellipse point, and the surface adjacent to this point is on the same side of the tangent plane of the point; the point is called a hyperbolic point, and the surface adjacent to this point is like a saddle; the point is called a parabolic point, this kind of point is called a parabolic point. The surface adjacent to the point resembles a half saddle.![]()
![]()
![]()
3. The three basic quadratic forms have the following linear relationship:![]()
![]()
or
7.
Asymptotic curves, conjugate curves and minimal surfaces
[ Asymptotic curve ] The direction in which the normal curvature of a point on the surface is equal to zero is called the asymptotic direction. Assuming that the tangent directions of all points on a surface curve C are asymptotic directions, then C is called an asymptotic curve of the surface. is the asymptotic direction if the second fundamental quadratic form is equal to zero: or this is the differential equation of the asymptotic curve. Such curves have a simple geometric feature:![]()
![]()
![]()
![]()
![]()
![]()
The approximation surface of the asymptotic curve coincides with the surface.
It can be seen that the asymptotic curve forms a second-order contact with the surface at its upper point.
In addition, there is Aineberg's theorem:
The torsion of the asymptotic curve , K is the total curvature of the surface ( when there is no asymptotic curve).![]()
![]()
[ Conjugate curve ] The two directions at a point on the surface are![]()
![]()
![]()
![]()
They are called conjugate directions of each other.
The asymptotic direction is self-conjugated.
The direction of the characteristic line of the tangent family of a curve C on the surface is the conjugate direction of the tangent of C.
The net composed of two families of curves satisfying the above differential equations is called a conjugate net.
[ Minimum surface ] A surface with an average curvature is called a minimal surface, and it can also be defined as a surface with the smallest area on a known boundary. A necessary and sufficient condition for a surface to be a minimal surface is that the asymptotic curves form an orthogonal network.![]()
Note: The necessary and sufficient conditions for the coordinate line ( u = constant and = constant) to be conjugate are: ; the necessary and sufficient condition for the coordinate line to be a line of curvature is: ; the necessary and sufficient condition for the coordinate line to be an asymptotic curve is: .![]()
![]()
![]()
![]()
8.
Basic formulas and basic equations of surfaces
[ Gauss's formula and Eingelden's formula ] Let the parametric equation of the surface be, take three non-coplanar vectors at each point M on the surface, and the trihedron composed of these three vectors is called the movable frame or the companion of the surface. Trihedral; note that here and are not perpendicular to each other, but they are both on the tangent plane and perpendicular to the normal unit vector N .![]()
![]()
![]()
![]()
|
Figure 7.27 |
The partial derivatives with respect to u , can be expressed as linear combinations of the following forms:![]()
![]()
 (1)
(1)
 (2)
(2)
where E , F , G and L , M , N are the first and second fundamental quantities of the surface, respectively; the six coefficients are called the Christopher notation of the second kind of the first fundamental quadratic form, and their expressions are equations The group ( 1 ) is called the partial differential equation of the surface, also known as the Gauss formula; the equation group ( 2 ) is called the External Ingledon formula; ( 1 ), ( 2 ) are collectively called the basic formula of the surface, the characteristics of these formulas Yes, the derivative of a vector is expressed as a linear combination of the vector itself, and its coefficient is only related to the first and second fundamental quantities of the surface .![]()
![]()
![]()
The integrable condition of [ Gaussian equation and Kodak odd equation ] equation system ( 1 ) is
 (3)
(3)
and
 (4)
(4)
The integrable condition of the system of equations ( 2 ) is ( 4 ) . The system of equations ( 4 ) becomes the Kodak odd equations .
From ( 3 ), the following theorem can be obtained:
1. The total curvature K of a surface by Gauss theorem can be represented by the first fundamental quantity and their first and second partial derivatives; therefore, the total curvature is an isometric invariant of the surface .
2. Under the equidistant correspondence, the corresponding points of the surface must have the same total curvature .
This important result shows that the two surfaces with different total curvatures are very different, and even if the surfaces are allowed to undergo arbitrary bending, the two surfaces cannot be made to fit each other .
The total curvature K is called the Gaussian equation with the expressions of E , F , G , and combined with the Kodak odd equation is called the fundamental equation of the surface .
|
Figure 7.28 |
[ Bornne's Theorem ] Given any two quadratic forms which are positive definite, assuming that the coefficients of and satisfy the Gaussian equation and the Kodak odd equation, then in addition to the difference in the spatial position, there is a unique surface with and as its The first and second elementary quadratic forms .
![]()
![]()
![]()
![]()
![]()
9.
Geodesic Curvature, Geodesic Lines and Geodesic Coordinates of Surface Curves
[ Geodesic curvature and Beltrami formula ] Let M be a point on the surface S , C be a curve passing through the point M on S , be the tangent of S on M , and be the orthoprojection of C on , then the curvature of M Called the geodesic curvature of C at M , denoted as .![]()
![]()
![]()
![]()
![]()
Suppose the parametric equation of surface S is , the equation of surface curve C is , then the geodesic curvature of C![]()
![]()
 (1)
(1)
in the formula
![]()
![]()
If the curve C takes the arc length s as the parameter, then
![]() (2)
(2)
in the formula
![]()
![]()
Equations ( 1 ) and ( 2 ) are called Beltrami's formulas for geodesic curvature .
Geodesic curvature is an isometric invariant .
[ Geodesic ] If the geodesic curvature of each point on a surface curve C is equal to zero, then C is called a geodesic line on the surface .
The differential equation for geodesics is also written as or
![]()
![]()
The differential equations for geodesics on surfaces are where p , q , r , s , t are shown in the previous table .![]()
![]()
Geodesics have properties:
1. The curvature of the geodesic line at each point M is less than the curvature at M of any curve tangent to it at M.
2. If the developable surface of the surface curve C is turned into a plane, then only the curve corresponding to the geodesic line is a straight line .
3. A sufficient and necessary condition for a surface curve C to be a geodesic is that the principal normal of each point on C coincides with the surface normal of the point, that is, the approximation surface of C contains the surface normal .
4. If two surfaces are tangent along a common curve C , suppose C is the geodesic of one surface, then C is also the geodesic of the other surface .
5. There is one and one geodesic line in each direction through each point on the surface .
6. In a sufficiently small neighborhood, a geodesic line is a geodesic line, that is, among all surface curves connecting two adjacent points on a surface, the geodesic line has the shortest length .
[ Geodesic coordinates ] If the coordinate line u = constant is the orthogonal trajectory of the geodesic line = constant, it is called geodesic coordinates, and this family of orthogonal trajectories is called geodesic parallel. At this time![]()
![]()
![]()
The total curvature in geodesic coordinates is
![]()
If the geodesic line = constant intersects at a point O , indicating the intersection angle between the geodesic line and the geodesic line , it is called geodesic polar coordinates, and the geodesic parallel line at this time is called a geodesic circle, and its radius is equal to u .![]()
![]()
![]()
![]()
![]()
[ Gaunier - Bornne formula ] Let G be a single connected region on the surface S , the boundary C of G is a closed curve that is smooth piece by piece and has no self-intersection points, and its running direction is that G is always on its left side .
|
Figure 7.29 |
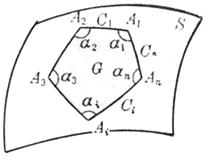
Let the geodesic curvature representing any point on the curve C be the surface area element, and be the interior angles of the corners of C ( figure ), then the double integral on G![]()
![]()
![]()
![]()
![]()
![]()
This is called the Gauss - Bornne formula . In particular
1. If C is a regular curve (ie, no corner points), then 2. If C is a geodesic polygon composed of n geodesic lines , then (because = 0 ) at that time , C is three The geodesic triangle composed of geodesic lines, at this time , the sum of the three interior angles of the geodesic triangle on the surface of , is greater than the sum of the interior angles of the geodesic triangle on the surface of ; the sum of the interior angles of the geodesic triangle on the surface of .![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()